Learning outcomes
The human hand is the organ that allows us to distinguish humans from other animal species. It is able to perform sophisticated movements, use objects as tools, interact with the environment and communicate with others. Manipulation is therefore fundamental in the development of motor and cognitive skills. Tactile perception and human sensory-motor coordination are two key aspects of human grip and manipulation that current prostheses are still unable to reproduce, despite the significant technological advances in robotics and prosthetics. Understanding the sensory-motor coordination mechanisms requires studying the ways in which movements performed with a well-defined goal use the information perceived by the sensory system.
One of the main challenges facing engineers and roboticists is to reproduce human manipulative abilities in upper limb prostheses, designed and manufactured to have form and function as similar as possible to those of the natural limbs. In consideration of all this, the PPR2 project aims to continue with scientific, technological and clinical advances on prosthetic systems for the upper limb, with particular reference to development of advanced interfacing and control solutions to improve performance in activities of daily living and make such systems more accessible, also pursuing the objective of contributing to the development of devices that are as "Made in Italy" as possible.
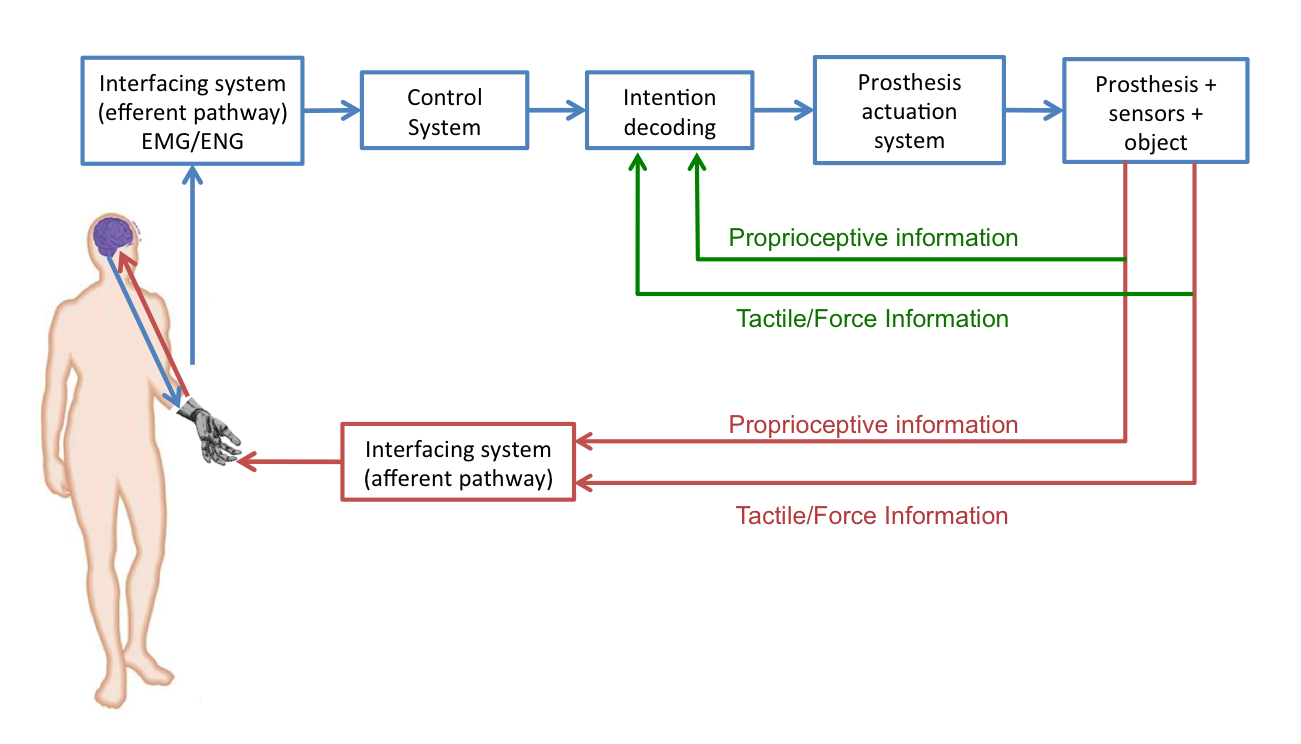
The project aims to develop a bidirectional control system of a polyarticulated hand prosthesis with two main features: (i) sensorimotor control loop based on proprioceptive and tactile perception for grasping and manipulation tasks; (ii) return of the sense of touch to the user on the afferent channel through intraneural interfaces. The main objective of the PPR2 project is therefore to develop a bidirectional control architecture from and towards the Peripheral Nervous System which, starting from the decoded signal on the patient's intention to move, is able to send motor commands to the prosthesis actuators on the basis of a local feedback to the prosthesis of a proprioceptive and tactile type and to generate and send to the amputee, on the afferent channel, a tactile perception relating to the task he is performing. Particular attention will then be paid to the modulation of the level of autonomy of the intelligence on board the prosthesis so as to be complementary to the direct control of the amputee, who, integrated into the control cycle of the prosthesis, will have to learn to exploit the tactile perception given back through stimulation of the afferent channel.
It is expected that the project will be able to produce results that can be concretely translated into outcomes in the medium-long term, in terms of devices and technologies to be made available to INAIL clients. In particular, since the project presents important scientific and technological challenges that will require the carrying out of some delicate basic research activities and their subsequent validation in the clinical setting, a modular approach will be adopted to evaluate the translationality of the different results both in the medium that in the long run.
Project start: 02 / 05 / 2014
Duration: 3 years
Partners: UCBM, INAIL