Obiettivi
La mano umana è l'organo che permette di distinguere gli umani dalle altre specie animali. Essa è in grado di eseguire movimenti sofisticati, usare gli oggetti come utensili, interagire con l'ambiente e comunicare con gli altri. La manipolazione è quindi fondamentale nello sviluppo delle capacità motorie e cognitive. La percezione tattile e la coordinazione sensori-motoria umana due aspetti chiave della presa e della manipolazione umana che le protesi attuali non riescono ancora a riprodurre, nonostante i notevoli avanzamenti tecnologici nell'ambito della robotica e della protesica. La comprensione dei meccanismi di coordinazione sensori-motoria richiede lo studio delle modalità con cui i movimenti compiuti con un obiettivo ben definito utilizzano le informazioni percepite dal sistema sensoriale.
Una delle principali sfide degli ingegneri e dei robotici è riprodurre le capacità di manipolazione umane nelle protesi dell'arto superiore, progettate e realizzate affinché abbiano forma e funzione quanto più simile possibile a quelle degli arti naturali. In considerazione di tutto ciò, il progetto PPR2 si propone di proseguire con gli avanzamenti scientifici, tecnologici e clinici sui sistemi protesici per l'arto superiore, con particolare riferimento allo sviluppo di soluzioni di interfacciamento e controllo avanzate per migliorare le prestazioni nelle attività della vita quotidiana e rendere più accessibili tali sistemi, perseguendo anche l'obiettivo di contribuire allo sviluppo di dispositivi quanto più possibile "Made in Italy".
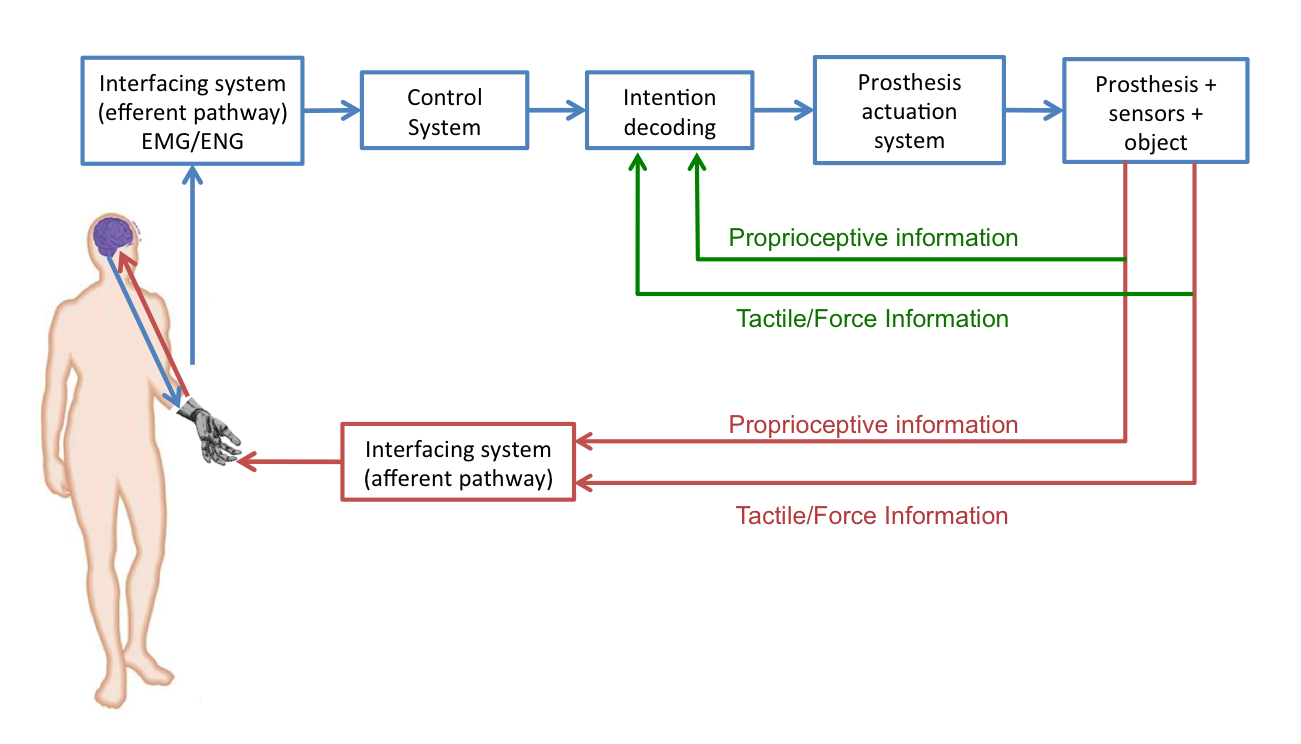
Il progetto ha l’obiettivo di sviluppare un sistema di controllo bidirezionale di una protesi di mano poliarticolata con due caratteristiche principali: (i) loop di controllo sensori-motorio basato su percezione propriocettiva e tattile per compiti di presa e manipolazione; (ii) restituzione del senso del tatto all'utente sul canale afferente attraverso interfacce intraneurali. L'obiettivo principale del progetto PPR2 è dunque sviluppare un'architettura di controllo bidirezionale da e verso il Sistema Nervoso Periferico che, a partire dal segnale decodificato sull'intenzione di moto del paziente sia in grado di mandare i comandi motori agli attuatori della protesi sulla base di un feedback locale alla protesi di tipo propriocettivo e tattile e di generare ed inviare al soggetto amputato, sul canale afferente, una percezione tattile relativa al compito che sta eseguendo. Si presterà poi particolare attenzione alla modulazione del livello di autonomia dell'intelligenza a bordo della protesi in modo da essere complementare al controllo diretto dell'amputato, il quale, integrato nel ciclo di controllo della protesi, dovrà imparare a sfruttare la percezione tattile restituitagli attraverso la stimolazione sul canale afferente.
Ci si aspetta che il progetto possa produrre risultati concretamente traducibili nel medio-lungo periodo in outcome, in termini di dispositivi e tecnologie da mettere a disposizione degli assistiti INAIL. In particolare, dal momento che il progetto presenta sfide scientifiche e tecnologiche importanti che richiederanno lo svolgimento di alcune delicate attività di ricerca di base e la loro successiva validazione in ambito clinico, si adotterà un approccio modulare per valutare la traslazionalità dei diversi risultati sia a medio che a lungo termine.
Inizio progetto: 02/05/2014
Durata: 3 anni
Partner: UCBM, INAIL